
However there is also more advanced stuff like landmarks heuristic for example. A pronounced as A star is a computer algorithm that is widely used in pathfinding and graph traversal.
A Search Algorithm Geeksforgeeks
An e ective algorithm should utilize memory to reduce time so long as memory does not exceed a given limit.
A star search algorithm time complexity. A is like Dijkstras Algorithm in that it can be used to find a shortest path. The algorithm efficiently plots a walkable path between multiple nodes or points on the graph. Time complexity Cheat Sheet.
A can be thought of as a dynamic programming algorithm. Iterative deepening A IDA is a graph traversal and path search algorithm that can find the shortest path between a designated start node and any member of a set of goal nodes in a weighted graph. The time complexity is mathcalObm.
Memory-bounded A Star MA 13 embodies this concept. The branching factor is the average number of neighbor nodes that can be expanded from. To conclude IDA has a better memory usage than A.
According to A Wiki the time-complexity is exponential in the depth of the solution shortest path. Obd where b is the branching factor the average number of successors per state. It is a variant of iterative deepening depth-first search that borrows the idea to use a heuristic function to evaluate the remaining cost to get to the goal from the A search algorithm.
You can select different heuristic functions that lead to different time complexities. This means that the algorithms can take the path with the least cost and find the best route in terms of distance and time. However A needs to keep all nodes in memory while searching not just the ones in the fringe because A essentially performs an exhaustive search which is informed in the sense that it uses a heuristic function.
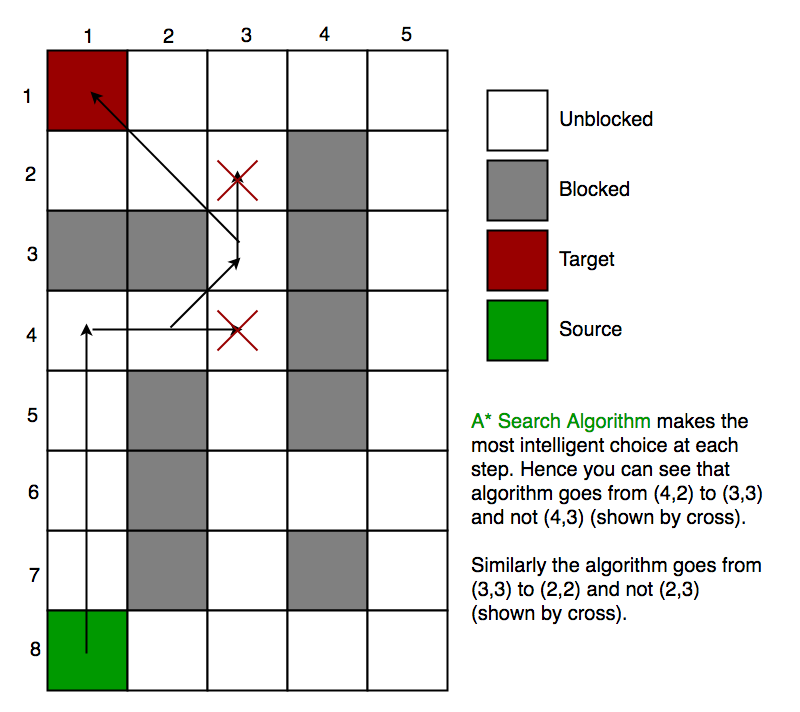
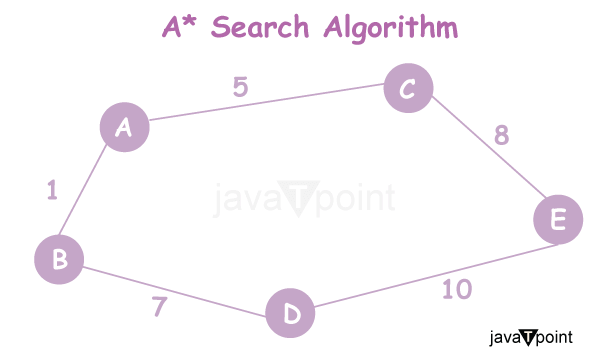
To find out the path from to with the minimum cost Procedure 1. A star by itself is no complete algorithm. What A Search Algorithm does is that at each step it picks the node according to a value- f which is a parameter equal to the sum of two other parameters g and h.
Algorithm Process Shuqing ZhangYang CaoTong Qiao CSCI 6121Arora2015 FALL 4 Given. In the example with a concave obstacle A finds a path as good as what Dijkstras Algorithm found. The Basic Concept of A Algorithm.
A major drawback of the algorithm is its space and time complexity. At each step it picks the nodecell having the lowest f and process that nodecell. Traversal swapping comparisons etc.
Based on the search problems we can classify the search algorithms into uninformed Blind search. BigO Graph Correction- Best time complexity for TIM SORT is Onlogn. Although most algorithms focused on reducing the worst-case memory complexity some took the approach of instead bounding memory usage.
For example we know that for calculating the time complexity we study the number of operations eg. There is a lot of information on time complexity analysis. A non-efficient way to find a path.
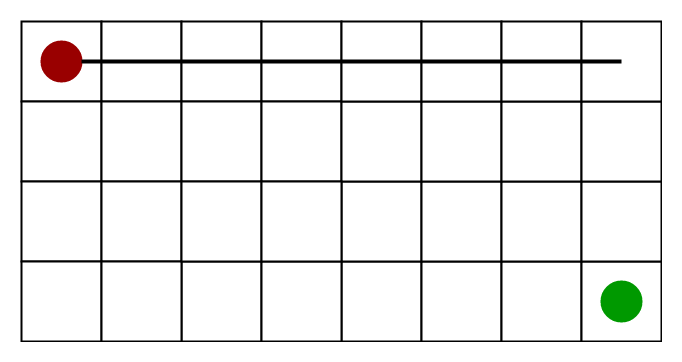
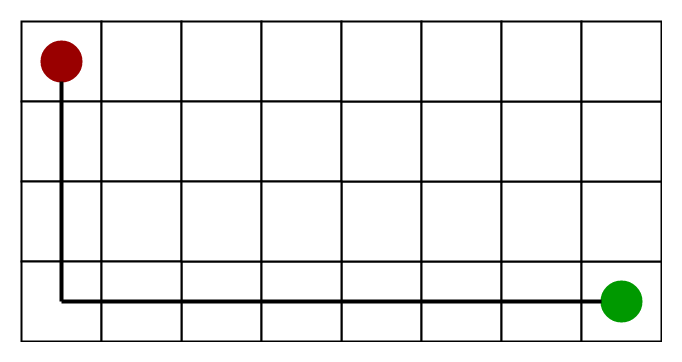
A star is Dijkstra with a heuristic that fulfills some properties like triangle inequality. Time complexity is a measure of time for an algorithm to complete its task. On a map with many obstacles pathfinding from points A A A to B B B can be difficult.
A robot for instance without getting much other direction will continue until it. In the worst case of an unbounded search space the number of nodes expanded is exponential in the depth of the solution the shortest path d. The idea is simple.
I doubt if any algorithm which using heuristics can really be approached by complexity analysis. A is like Greedy Best-First-Search in that it can use a heuristic to guide itself. The time complexity is On in a grid and Obd in a graphtree with a branching factor b and a depth d.
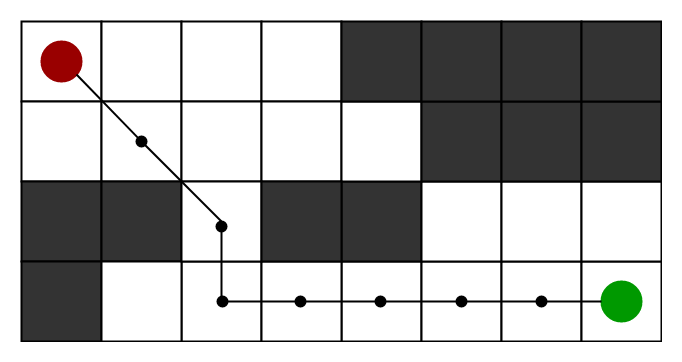
It takes a large amount of space to store all possible paths and a lot of time to find them. Were in high demand. A is also complete unless there are infinitely many nodes to explore in the search space.
Class Search algorithm Data structure Graph Worst-case performance Worst-case space complexity A search algorithm In computer science A pronounced as A star is a computer algorithm that is widely used in pathfinding and graph traversal which is the process. Types of search algorithms. This is also stated in the first publication page 252 second paragraph for A.
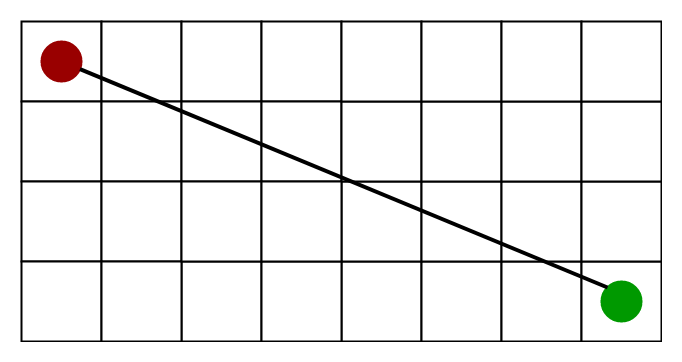
The simplest heuristic is straight line distance. Put s on a list called OPEN. As in A and unlike IDDFS it concentrates on exploring the most promising nodes and thus does not go to the same depth everywhere in the search tree whereas ordinary IDDFS does.
A good heuristic can make the search very fast but it may take a long time and consume a lot of memory in a large search space. It is the maximum storage space required at any point during the search as the complexity of the problem. A graph of nodes is start is goal Aim.
The time complexity of A depends on the heuristic. Create a search graph G consisting solely of the start node s. IDA still has an exponential time complexity of A.
In the simple case it is as fast as Greedy Best-First-Search. A is complete and optimal it will find the shortest path to the goal.
Algorithm Time Complexity And Big O Notation By Stuart Kuredjian Medium
Informed Search Algorithms In Ai Javatpoint
A Search Algorithm Geeksforgeeks

A Algorithm With Java Example Happycoders Eu

A Search Algorithm In Artificial Intelligence Algorithm Time Complexity Artificial Intelligence
A Search Algorithm Geeksforgeeks
A Search Algorithm Geeksforgeeks

Graphs In Java A Algorithm
A Search Algorithm Geeksforgeeks